
| 文件夹 | 补充说明Description |
|---|---|
| INC | 存放标准库及项目.h头文件 |
| MDK | Keil5项目文件目录 |
| OUTPUT | 链接中间文件、AXF烧录文件等输出目录 |
| SRE | 存放主函数及项目其余.c文件 |
| keil选项 | 填写内容 |
|---|---|
| Output | 选择目录「OUTPUT」,生成HEX文件 |
| C/C++ | Define : USE_STDPERIPH_DRIVER,STM32F10X_MD Language/ Code Generation : > C99 mode Include Paths : ..\INC ..\..\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x ..\..\Libraries\STM32F10x_StdPeriph_Driver\inc |
| Debug | ST-Link Debugger – Port : SW |
C
#include "stm32f10x_it.h"
#include "usart.h"
#include "delay.h"
#include "oled.h"
uint32_t TimingDelay = 0; //Delay函数 中断实现 递减
uint8_t USART_RXBUF[20]; //接收数组
extern uint8_t RXOVER;
int main(void)
{
uint8_t i;
USART_Config(); //串口中断 | RX | TX 配置
SysTick_Config(SystemCoreClock/1000); //1ms中断一次
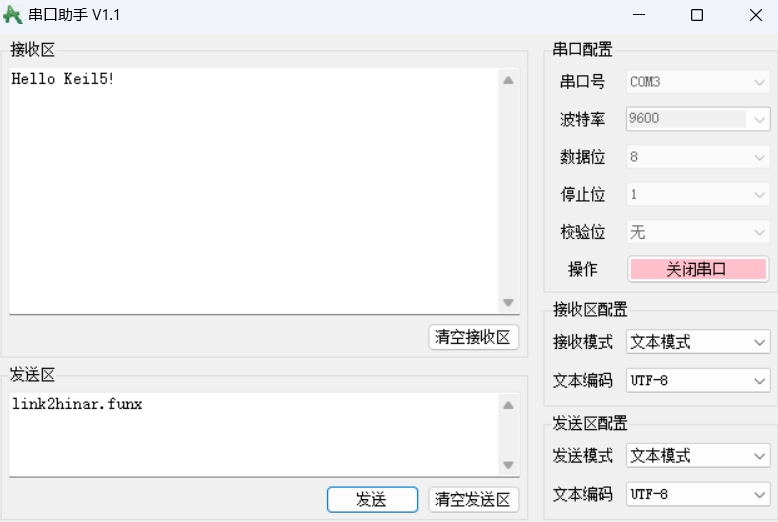
USART_SendString((int8_t*)"Hello Keil5!\r\n"); //测试串口发送
/*OLED初始化*/
OLED_Init();
while(1) {
if(RXOVER == 1) { //接收到数据时激活
/*在(0, 0)位置显示发送字符串,字体大小为8*16点阵*/
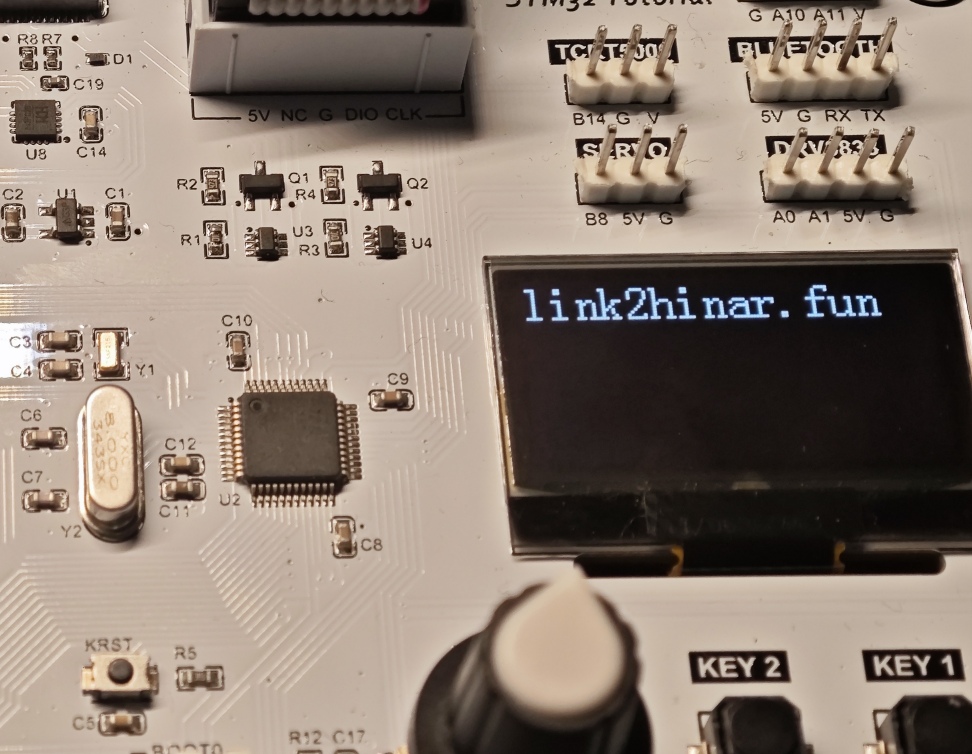
OLED_ShowString(0, 0, (char*)USART_RXBUF, OLED_8X16);
/*调用OLED_Update函数,将OLED显存数组的内容更新到OLED硬件进行显示*/
OLED_Update();
/*延时3000ms,观察现象*/
Delay_ms(3000);
for(i = 0; i < 20; ++i) {
USART_RXBUF[i] = 0; //清空接收数组
}
RXOVER = 0;
USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
}
}
}C
#include "usart.h"
#include "stm32f10x.h"
#define USART_FLAG_TXE ((uint16_t)0x0080)
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
//Interrupt
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//TX
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//RX
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//比特率参数对等设定
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART2, &USART_InitStructure);
USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
USART_Cmd(USART2, ENABLE);
}
void USART_SendString(int8_t *str) //等待机制发送数据
{
uint8_t index = 0;
do {
USART_SendData(USART2, str[index]);
while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET);
++index;
} while(str[index]);
}C
void USART2_IRQHandler(void)
{
uint8_t temp;
if(USART_GetFlagStatus(USART2, USART_IT_RXNE) != RESET) {
USART_ClearITPendingBit(USART2, USART_IT_RXNE);
temp = USART_ReceiveData(USART2);
if((temp == 'x') || (RXCONT == 20)) { //终止位
RXCONT = 0;
RXOVER = 1;
USART_ITConfig(USART2,USART_IT_RXNE,DISABLE);
}
else{
USART_RXBUF[RXCONT] = temp;
++RXCONT;
}
}
}