C
uint32_t TimingDelay = 0;
void USART_Config(void);
void USART_SendString(int8_t *str);
void Delay_Ms(uint32_t nTime)
{
TimingDelay = nTime;
while(TimingDelay != 0);
}
int main(void)
{
USART_Config();
SysTick_Config(SystemCoreClock/1000);
Delay_Ms(200);
USART_SendString("Welcome to link2hinar.fun!");
while(1);
}C
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
//Deploy USART2 TX Mode
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Deploy USART2 RX Mode
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Deploy USART2 Mode
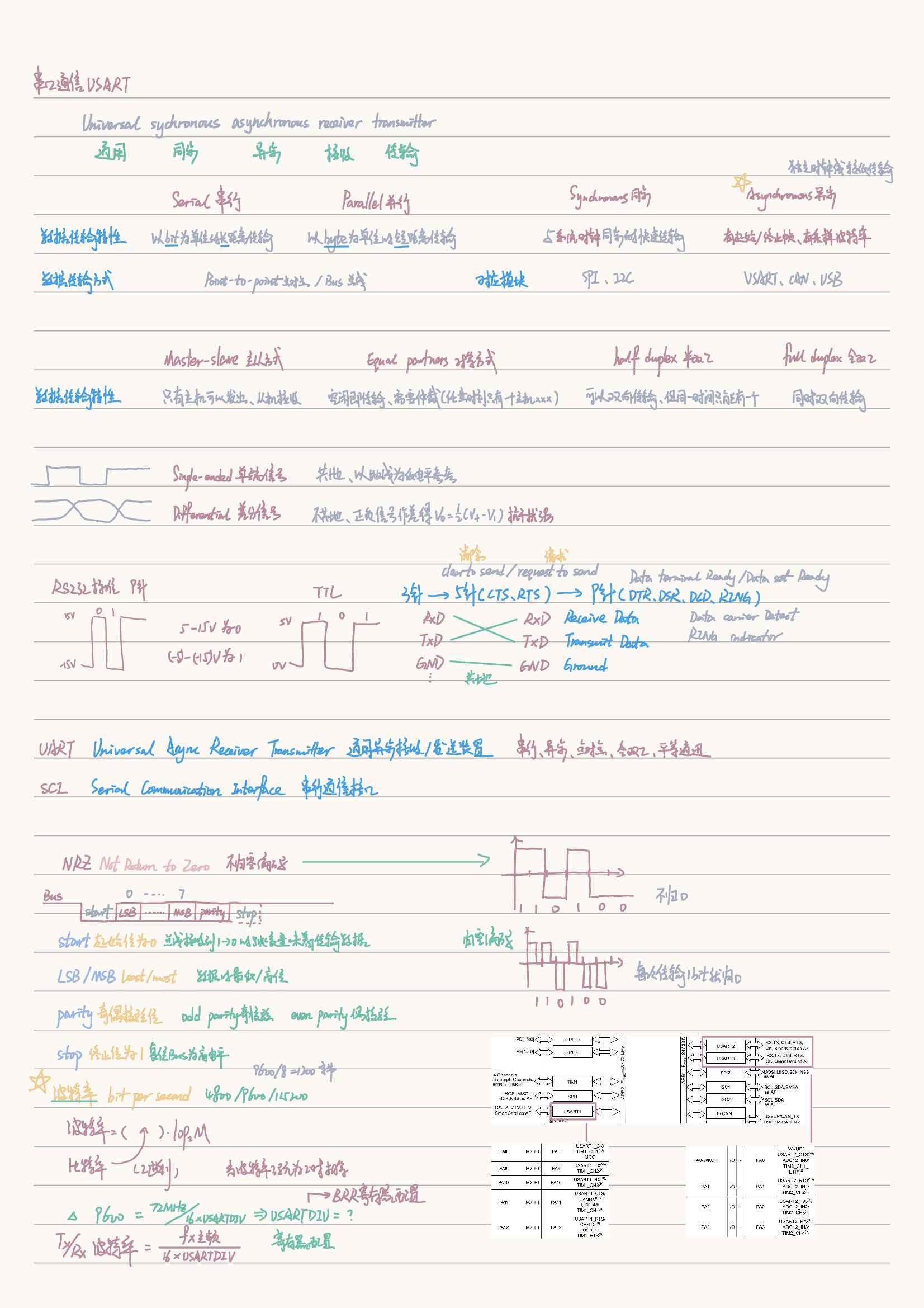
USART_InitStructure.USART_BaudRate = 19200;
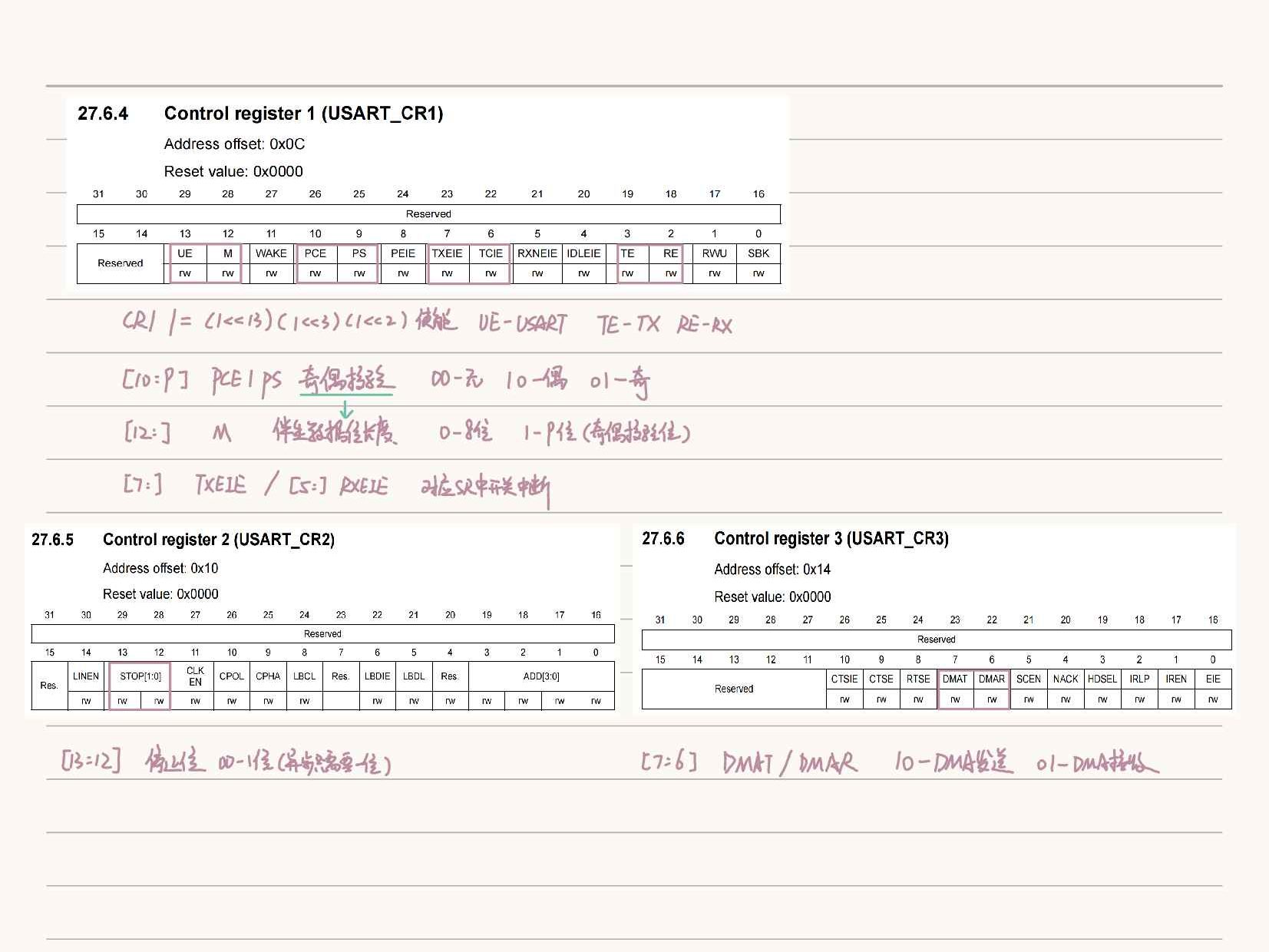
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure);
USART_Cmd(USART2, ENABLE);
}C
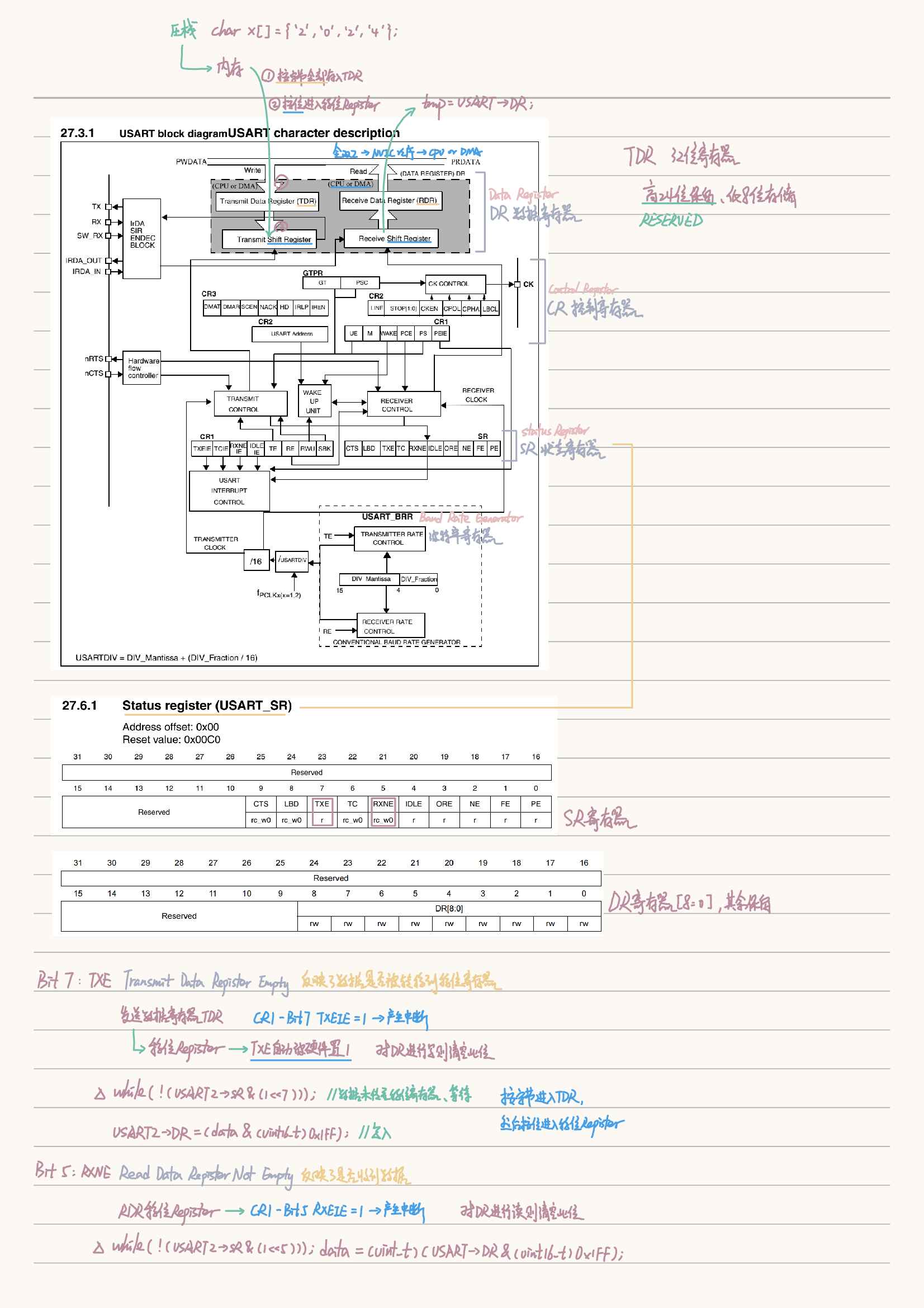
#define USART_FLAG_TXE ((uint16_t)0x0080) //bit7 = 1
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
{
USARTx->DR = (Data & (uint16_t)0x01FF);
}
FlagStatus USART_GetFlagStatus(USART_TypeDef*USARTx, uint16_t USART_FLAG)
{
FlagStatus bitstatus = RESET;
if ((USARTx->SR & USART_FLAG) != (uint16_t)RESET) {
bitstatus = SET;
}
else {
bitstatus = RESET;
}
return bitstatus;
}
void USART_SendString(int8_t *str)
{
uint8_t index = 0;
do {
USART_SendData(USART2, str[index]);
while(USART_GetFlagStatus(USART2,USART_FLAG_TXE) == RESET);
++index;
}
while(str[index] != 0);
}C
#include "stm32f10x.h"
#include "stdio.h"
uint8_t USART_RXBUF[20];
extern uint8_t RXOVER;
void NVIC_Configuration(void);
void USART_Config(void);
void EXTI_Config(void);
void USART_SendString(USART_RXBUF);
int main(void)
{
uint8_t i;
USART_Config();
while(1) {
if (RXOVER == 1) {
USART_SendString(USART_RXBUF);
USART_SendString("\r\n");
for(i = 0; i < 20; ++i) {
USART_RXBUF[i] = 0;
}
RXOVER = 0;
USART2->CR1 |= 1 << 5;
}
}
}C
#include "stm32f10x_it.h"
extern uint8_t USART_RXBUF[20];
uint8_t RXOVER = 0;
uint8_t RXCUNT = 0;
void USART2_IRQHandler(void)
{
uint8_t temp; //判断中断标志位(USART2的bit5位为1表明接收到一个字符)
if(USART2->SR & (1 << 5) == SET) {
USART2->SR &= ~(1 << 5); //清除中断标志位USART2_SR的bit5为0
temp = (uint16_t)(USARTx->DR & (uint16_t)0x01FF);//读USART2_DR的数据
if((temp == 'x') || (RXCUNT == 20)) {
RXCUNT = 0;
RXOVER = 1;
USART2->CR1 &= ~(1 << 5);//禁止接收数据产生中断
}
else {
USART_RXBUF[RXCUNT] = temp;//接收到的数据放到USART_RXBUF[20]
++RXCUNT;
}
}
}